
Das Konzept
Normale Quadcopter müssen sich immer neigen, um in eine Richtung zu fliegen. 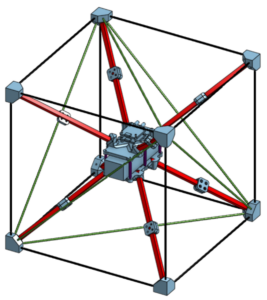 Die Translation ist also von der Rotation des Copters abhängig. Es gibt verschiedene Konzepte, wie man diese Freiheitsgrade trennen kann. Die meisten davon nutzen zusätzliche Propeller in speziellen Orientierungen. Da es bei der IMAV 2023 mehrere Vorträge gab, in denen solche manövrierfähigen Copter vorgestellt wurden, wollten wir ebenfalls ein Aufbauen. Das Design „Omnicopter“ nutzt 8 Motoren, die in speziellen Winkeln montiert sind und so konfiguriert werden, dass sie sich in beide Richtungen drehen können. So kann Schub in jede Richtung erzeugt werden.
Die Translation ist also von der Rotation des Copters abhängig. Es gibt verschiedene Konzepte, wie man diese Freiheitsgrade trennen kann. Die meisten davon nutzen zusätzliche Propeller in speziellen Orientierungen. Da es bei der IMAV 2023 mehrere Vorträge gab, in denen solche manövrierfähigen Copter vorgestellt wurden, wollten wir ebenfalls ein Aufbauen. Das Design „Omnicopter“ nutzt 8 Motoren, die in speziellen Winkeln montiert sind und so konfiguriert werden, dass sie sich in beide Richtungen drehen können. So kann Schub in jede Richtung erzeugt werden.
 Auch kann er sich dadurch um jede der drei Achsen drehen, ohne sich von der Stelle zu bewegen, und ist somit äußerst beweglich.
Auch kann er sich dadurch um jede der drei Achsen drehen, ohne sich von der Stelle zu bewegen, und ist somit äußerst beweglich.
Der Aufbau
Alles begann mit dem 3D-Druck: Die Ecken und die zentrale Gondel nahmen Form an, während wir gleichzeitig die Carbonstäbe zuschnitten. Damit setzten wir den würfelförmigen Rahmen zusammen. Dann wurde gelötet – die Motoren mussten an die Motorcontroller und die restlichen elektronischen Komponenten miteinander verbunden werden. Als alles sicher am Rahmen befestigt war, stand die Konstruktion endlich vor uns. Jetzt mussten nur noch die Motorcontroller und der Flightcontroller konfiguriert werden.
Hintergrund
 Während wir das automatisierte Abfliegen von Wegpunkten inklusive Start und Landung mithilfe von Globalen Navigationssatellitensystemen (GNSS) mittlerweile recht gut beherrschen, sind wir mit der Automatisierung bei „Indoor“-Szenarien (wenn also keine GNSS zur Verfügung stehen) noch relativ unerfahren. Statt GNSS muss hier Sensorik zur Umwelterkennung, wie beispielsweise Kameras, Stereokameras oder Laserscanner, verwendet werden. Mithilfe von SLAM-Algorithmen (SLAM, engl: Simultaneous Localization and Mapping) lässt sich aus den Sensordaten gleichzeitig eine Karte der Umgebung sowie die Position in dieser Umgebung bestimmen. Mit einer geeigneten Flugbahnplanung kann dann die anfangs noch unbekannte Umgebung erkundet werden.
Während wir das automatisierte Abfliegen von Wegpunkten inklusive Start und Landung mithilfe von Globalen Navigationssatellitensystemen (GNSS) mittlerweile recht gut beherrschen, sind wir mit der Automatisierung bei „Indoor“-Szenarien (wenn also keine GNSS zur Verfügung stehen) noch relativ unerfahren. Statt GNSS muss hier Sensorik zur Umwelterkennung, wie beispielsweise Kameras, Stereokameras oder Laserscanner, verwendet werden. Mithilfe von SLAM-Algorithmen (SLAM, engl: Simultaneous Localization and Mapping) lässt sich aus den Sensordaten gleichzeitig eine Karte der Umgebung sowie die Position in dieser Umgebung bestimmen. Mit einer geeigneten Flugbahnplanung kann dann die anfangs noch unbekannte Umgebung erkundet werden.
Seit dem Wintersemester 2017/2018 arbeiten wir nun an unserem ersten Indoor-Copter, der mit einer Stereokamera und einem Laserscanner ausgestattet wird.
Aktuelle Arbeiten
Bis zum flugfähigen Indoor-Copter ist noch viel zu tun. Die Sensorik und der Onboard-PC müssen noch integriert werden. Anschließend müssen die notwendigen Algorithmen für das „maschinellen Sehen“ implementiert und getestet werden. Wenn du Lust auf dieses Thema hast – evtl. auch in Kombination mit einer Studien- oder Abschlussarbeit – würden wir uns über deine Unterstützung freuen.
Hintergrund
Eines unserer neuesten Projekte, welches im Sommersemester 2018 begonnen hat, ist die Entwicklung eines Search and Rescue UAVs. Solche Flugsysteme spielen z.B. für den Einsatz in zivilen Katastrophengebieten eine immer größere Rolle. Sie ermöglichen es Einsatzkräften, sich einen schnellen Überblick unübersichtlicher Gebiete aus der Luft zu verschaffen und daraus Handlungsmöglichkeiten abzuleiten.
Das Search and Rescue UAV baut auf den gesammelten Erfahrungen beim Projekt Alexa (Quadrcopter zur Kartographierung), wobei hier zusätzlich die Erkennung markanter Merkmale zur Identifizierung von Menschen und Brandherden erforderlich ist. Hierfür soll ein Kamera-Konzept mit Objekterkennung durch Machine Learning Verfahren zum Einsatz kommen. Um Störungen in einer Kamera (z.B. durch schlechte Lichtverhältnisse) zu vermeiden, sollen zwei Kamera-Typen – eine RGB-Kamera und eine Infrarotkamera – kombiniert eingesetzt werden.
Aktuelle Arbeiten
Das Projekt befindet sich noch in der Anfangsphase – also ideal geeignet für Neueinsteiger, sich einzubringen.
Die nächsten Arbeitspakete sind:
- Aufbau und Inbetriebnahme des Multicopters,
- Test der unterschiedlichen Kameras,
- Test der digitalen Funkstrecke.
Hintergrund
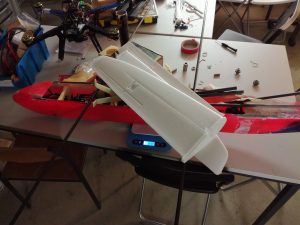
 Unser Heckstarter-Nurflügler mit Verstellpropeller, die Carolo ViTOLmina, ist die Weiterentwicklung unseres Senkrechtstarters Arkbird. Ziel der Weiterentwicklungen war es, die Flugleistungen deutlich zu erhöhen: Die Reisefluggeschwindigkeit bzw. Reichweite sollte deutlich erhöht werden und die Nutzlast auf mindestens 200g erhöht werden. Hierzu wurde die Oberflächengüte verbessert, ein neuer Rumpf mit vergrößertem Volumen konstruiert, die Struktur verstärkt und ein Verstellpropeller entwickelt.
Unser Heckstarter-Nurflügler mit Verstellpropeller, die Carolo ViTOLmina, ist die Weiterentwicklung unseres Senkrechtstarters Arkbird. Ziel der Weiterentwicklungen war es, die Flugleistungen deutlich zu erhöhen: Die Reisefluggeschwindigkeit bzw. Reichweite sollte deutlich erhöht werden und die Nutzlast auf mindestens 200g erhöht werden. Hierzu wurde die Oberflächengüte verbessert, ein neuer Rumpf mit vergrößertem Volumen konstruiert, die Struktur verstärkt und ein Verstellpropeller entwickelt.

Propeller mit festem Blatteinstellwinkel können ab einer bestimmten Fluggeschwindigkeit keinen Schub mehr generieren, da die Drehzahl unseres Antriebs begrenzt ist. Mit dem Verstellpropeller soll der Blatteinstellwinkel so angepasst werden, dass auch bei hohen Fluggeschwindigkeiten noch ein Anstellwinkel am Blatt vorliegt und somit Schub generiert werden kann.
Aktuelle Arbeiten
Carolo ViTOLmina sollte auf einem Wettbewerb eingesetzt werden und ist, da wir wegen hohen Zeitdrucks trotz technischer Probleme mit der Flugerprobung beginnen wollten, leider abgesturzt. Das Fluggerät muss somit zunächst repariert werden.
Anschließend soll die Inbetriebnahme erfolgen und die Flugleistung erprobt werden. Es gibt außerdem einige Ideen, wie sich die Flugleistungen durch weitere konstruktive Maßnahmen noch weiter nach oben schrauben lassen.
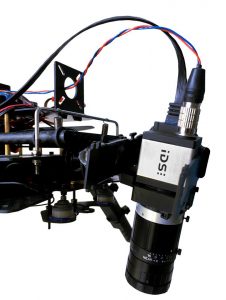
Des weiteren soll an der Nase eine Kamera mit Gimbal und zusätzlichem Onboard-PC eingebaut werden. Mit diesem Sensor-Konzept sollen zukünftig z.B. Mapping-Aufgaben durchgeführt werden.
Dieses Projekt stellt somit einen Querschnitt der Tätigkeiten in der AKAMAV dar. Wenn du dich für eine oder mehrere dieser Aufgaben (beispielsweise Flugsysteme, Elektronik, Computer Vision) interessierst, würden wir uns freuen, wenn du dich unserem Team anschließt.
Technische Daten
| Kenngröße | Daten |
| Abflugmasse | 2800 g (2 Akkus) bis 3250 g (3 Akkus) |
| Leermasse | 1750 g |
| max. Fluggeschwindigkeit | 40 m/s (noch nicht erprobt) |
| max. Flugzeit | 60 min (noch nicht erprobt) |
| max. Leistung | 1600 W |
| Flächenbelastung | ca. 185 g/dm² |
| Spannweite | 910 mm |
| Flügelstreckung | 4 |
| Pfeilung | 18° |
| Profilform | symmetrisch |
| relative Profildicke | 0,09 |
| Material Flügel | EPP, von innen mit CFK Stäben verstärkt, von außen laminiert mit GFK (25 g/m²), geschliffen, lackiert |
| Material Rumpf | PLA 3D-Druck, mit CFK Stäben verstärkt, Oberfläche geschliffen und geätzt |
Hintergrund

Für eine Teilaufgabe der IMAV 2017 (Wettbewerb) wurde im Sommersemester 2017 ein Senkrechtstarter (VTOL) in Heckstarter-Nurflügler-Konfiguration aufgebaut und erfolgreich eingesetzt. Es wurde auf einen Bausatz zurückgegriffen, der zusammengeklebt werden musste, die selbst ausgewählte Elektronik für den Antrieb und die Steuerung wurde verlötet und integriert und schließlich als zentraler Baustein ein Pixhawk (Mikrocontroller zur Realisierung von Autopiloten) verbaut. Die größte Hürde war es, die fertige Hardware dann auch zuverlässig zum Fliegen zu bringen, da das natürliche Flugverhalten dieser Konfiguration je nach Betriebspunkt mehr oder weniger instabil ist und somit künstlich durch eine aktive Regelung stabilisiert werden muss. Hierfür wurden zahlreiche Parameteranpassungen in der Firmware ArduPlane, welche auf dem Pixhawk läuft, vorgenommen. Durch weitere Parameteränderungen wurde eine Flugbahnregelung so eingestellt, dass das Fluggerät in der Lage war eine Mission vom Start bis zur Landung ohne Eingriff des Piloten durchzuführen – dies hat am Ende sogar bei starkem Wind gut funktioniert (siehe Video).
Vorhaben
Wir wollen das Thema Senkrechtstarter gerne weiter verfolgen und erneut auf den „Arkbird“-Bausatz zurückgreifen. Allerdings möchten wir dieses Mal nach den Erfahrungen mit dem ersten Modell bestimmte Komponenten selber entwerfen und 3D Drucken. Auf diese Weise sollen u. a. die Aerodynamik verbessert und mehr Platz für zusätzliche Komponenten geschafft werden. Man kann sich hier also in allen erdenklichen Bereichen austoben (3D Design, kleben, sägen, löten…) und zu guter Letzt einen Einstieg in die Flugdynamik und Regelungstechnik von Tailsitter Senkrechstartern und gängigen UAV Softwaresystemen erhalten. Eine perfekte Gelegenheit also um als interessierter Neuling einen Einstieg in die Thematik zu bekommen.
- Es wird KEIN Vorwissen vorausgesetzt. Ein gesunder Menschenverstand und Interesse an der Thematik reichen vollkommen aus.
- Ein Quereinstieg ist jederzeit möglich.
Technische Daten
| Kenngröße | Daten |
| max. Abflugmasse | 1400 g |
| Leermasse | 750 g |
| max. Fluggeschwindigkeit | 28 m/s |
| max. Flugzeit (bei 15 m/s Fluggeschwindigkeit) | 45 min |
| max. Leistung | 900 W |
| Flächenbelastung | 66 g/dm² |
| Spannweite | 860 mm |
| Flügelstreckung | 4 |
| Pfeilung | 18° |
| Profilform | symmetrisch |
| relative Profildicke | 0,09 |
| Material Flügel | EPP, von innen mit CFK Stäben verstärkt |
| Material Rumpf | EPP und Balsaholz |
Kurzbeschreibung

 Für eine Teilaufgabe der IMAV 2017 (Wettbewerb) wurde im Wintersemester 2016/2017 mit der Entwicklung eines Quadrocopters mit einem maximalen Abfluggewicht von 2 kg zur Onboard-Kartierung begonnen. Dies war wegen dem vorgegebenen maximalen Abfluggewicht und wegen der Onboard-Anforderung eine sehr herausfordernde Aufgabe. Für ein geringes Gewicht wurde auf einen hochwertigen CFK-Rahmen und hochwertige CFK-Propeller gesetzt. Die Onboard-Kartierung wurde im Rahmen einer Studienarbeit mithilfe von Mavros entwickelt und auf einem Odroid XU4 implementiert. Weitere Infos befinden sich im IMAV 2017 DEBRIEF.
Für eine Teilaufgabe der IMAV 2017 (Wettbewerb) wurde im Wintersemester 2016/2017 mit der Entwicklung eines Quadrocopters mit einem maximalen Abfluggewicht von 2 kg zur Onboard-Kartierung begonnen. Dies war wegen dem vorgegebenen maximalen Abfluggewicht und wegen der Onboard-Anforderung eine sehr herausfordernde Aufgabe. Für ein geringes Gewicht wurde auf einen hochwertigen CFK-Rahmen und hochwertige CFK-Propeller gesetzt. Die Onboard-Kartierung wurde im Rahmen einer Studienarbeit mithilfe von Mavros entwickelt und auf einem Odroid XU4 implementiert. Weitere Infos befinden sich im IMAV 2017 DEBRIEF.
Technische Daten
| Kenngröße | Daten |
| max. Abflugmasse | 2000 g |
| max. Flugzeit | 20 min |
| max. Leistung | ca. 1600 W |
| Rahmengröße | 560 mm |
| Flight Controller | Pixhawk 2.1 mit ArduCopter Firmware |
| Kamera | UI-5280CP, 5 MPix, global shutter |
| Bildverarbeitung | Odroid XU4 mit Mavros |
Hintergrund
 Der Changyucopter, eine Tandem-Kippflügel-Konfiguration, ist der erste von der AKAMAV entwickelte und gebaute Senkrechtstarter. Die Arbeiten wurden im Wintersemester 2016/2017 begonnen und im Sommer 2017 aufgrund von Problemen bei der Inbetriebnahme auf Eis gelegt.
Der Changyucopter, eine Tandem-Kippflügel-Konfiguration, ist der erste von der AKAMAV entwickelte und gebaute Senkrechtstarter. Die Arbeiten wurden im Wintersemester 2016/2017 begonnen und im Sommer 2017 aufgrund von Problemen bei der Inbetriebnahme auf Eis gelegt.
Von der Tandem-Kippflügel-Konfiguration wird erwartet, dass sie eine vielversprechende Ausführung eines senkrechtstartenden Flugsystems für Missionen mit einer hohen Anforderung an Rechweite und Flugzeig ist. Vorteile dieser Konfiguration liegen darin, dass sie trotz relativ hoher Flügelstreckung und somit hoher aerodynamische Effizienz eine geringe Spannweite besitzt, also kompakt ist. Dass die Hardware funktionstüchtig ist, wurde in einem Schwebeflugtest nachgewiesen.
 Im Rahmen einer Masterarbeit wurde ein flugdynamisches Simulationsmodell des Flugzeuges erstellt und darauf basierend eine Flugregelung entwickelt, die es ermöglichen sollte, den Senkrechtstarter nicht nur während des Schwebe- und Flächenflugs sondern auch in der Transition – also zwischen den beiden Betriebspunkten – automatisch zu stabilisieren. Während die Flugregelung in der Simulation funktionierte, konnte der Changyucopter bisher noch nicht damit in Betrieb genommen werden.
Im Rahmen einer Masterarbeit wurde ein flugdynamisches Simulationsmodell des Flugzeuges erstellt und darauf basierend eine Flugregelung entwickelt, die es ermöglichen sollte, den Senkrechtstarter nicht nur während des Schwebe- und Flächenflugs sondern auch in der Transition – also zwischen den beiden Betriebspunkten – automatisch zu stabilisieren. Während die Flugregelung in der Simulation funktionierte, konnte der Changyucopter bisher noch nicht damit in Betrieb genommen werden.
Technische Umsetzung
 Die Struktur beruht auf einem Rumpf aus GFK und von Multiplex gekauften Elapor-Flügeln, die mit CFK-Rohren verstärkt wurden. Die Flügel können mit einem selbst konstruierten Kippmechanismus, der 3D-gedruckt wurde und mit einem starken Servo betätigt wird, um über 90° gekippt werden.
Die Struktur beruht auf einem Rumpf aus GFK und von Multiplex gekauften Elapor-Flügeln, die mit CFK-Rohren verstärkt wurden. Die Flügel können mit einem selbst konstruierten Kippmechanismus, der 3D-gedruckt wurde und mit einem starken Servo betätigt wird, um über 90° gekippt werden.
 Für den Schwebeflug benötigt das Flugzeug vier Antriebe, die wie bei einem Quadrocopter angeordnet sind. Im Flächenflug werden zur Roll- und Nicksteuerung Elevons am vorderen Flügel eingesetzt.
Für den Schwebeflug benötigt das Flugzeug vier Antriebe, die wie bei einem Quadrocopter angeordnet sind. Im Flächenflug werden zur Roll- und Nicksteuerung Elevons am vorderen Flügel eingesetzt.
Aktuelle Arbeiten
Als nächstes muss die entwickelte Regelung auf dem Mikrocontroller (Pixhawk) implementiert werden, damit Testflüge durchgeführt werden können. Die Implementierung stellt derzeit noch eine Hürde dar. Außerdem sind aerodynamische und strukturelle Verbesserungen möglich.
Technische Daten
| Kenngröße | Daten |
| max. Abflugmasse | 5000 g |
| Leermasse | ca. 3500 g |
| max. Fluggeschwindigkeit | 30 m/s (noch nicht erprobt) |
| max. Flugzeit | 45 min (noch nicht erprobt) |
| max. Leistung | 3200 W |
| Flächenbelastung | 143 g/dm² |
| Spannweite | 1350 mm |
| Flügelstreckung | 10 |
| Pfeilung | 5° |
| Profilform | Multiplex Funglider |
| Sensorik | IMU, Magnetometer, GPS, Airspeed |
| Aktuatorik | 4x Antrieb mit 10×5 Propellern, 2x Kippmechanismen, 2x Elevons am vorderen Flügel |
| Flugregelung | Pixhawk 2.1 (Mikrocontroller) basierend auf PX4 (Firmware), geregelt mit Code generiert aus MATLAB/Simulink |
| Material Flügel | Elapor, von innen mit CFK Stäben verstärkt |
| Material Rumpf | GFK, mit Styrodur verstärkt |
| Material Kippmechanismen | PLA-Gehäuse und -Zahnräder, mit jeweils 4 Kugellagern gelagert, verschraubt |
Kurzbeschreibung
 Schon einige Jahre zuvor hat die AKAMAV erfolgreich Luftschiffe gebaut und betrieben. Diese Tradition sollte mit einem neuen, größeren Luftschiff – Luschi genannt – wieder aufleben. Der Grundstein wurde im Rahmen eines Workshops im Wintersemester 2015/2016 gelegt.
Schon einige Jahre zuvor hat die AKAMAV erfolgreich Luftschiffe gebaut und betrieben. Diese Tradition sollte mit einem neuen, größeren Luftschiff – Luschi genannt – wieder aufleben. Der Grundstein wurde im Rahmen eines Workshops im Wintersemester 2015/2016 gelegt.
Aktuelle Arbeiten
Luschi ist etwas schwierig zu steuern, da der Antrieb unten angebracht ist und somit auch ein Nickmoment erzeugt. Dies soll durch eine geeignetere Anordnung des Antriebs behoben werden. Auch eine automatisierte Steuerung für Luschi, z.B. mit einem Pixhawk, steht noch aus.