Die Corona-bedingten Maßnahmen sind auch für uns eine Herausforderung, da unsere Werkstatt nicht mehr als zwei Personen gleichzeitig betreten dürfen. Zum Glück arbeiten wir nicht nur an Hardware sondern auch an Software, was auch außerhalb von unserer Werkstoff problemlos möglich ist.
Unsere Treffen halten wir nun wann immer möglich virtuell per BigBlueButton (BBB) ab. Für unser Mittwochstreffen ab 19 Uhr haben wir einen öffentlichen BBB-Raum eingerichtet, der – genau wie unsere Werkstatt – zu dieser Zeit für alle Personen zugänglich ist. Dieser BBB-Raum kann unkompiliziert per Webbrowser über den folgenden Link betreten werden: https://webconf.tu-bs.de/yan-4cy-w9v
Öffentlicher BigBlueButton-Raum der AKAMAV: https://webconf.tu-bs.de/yan-zwn-agj
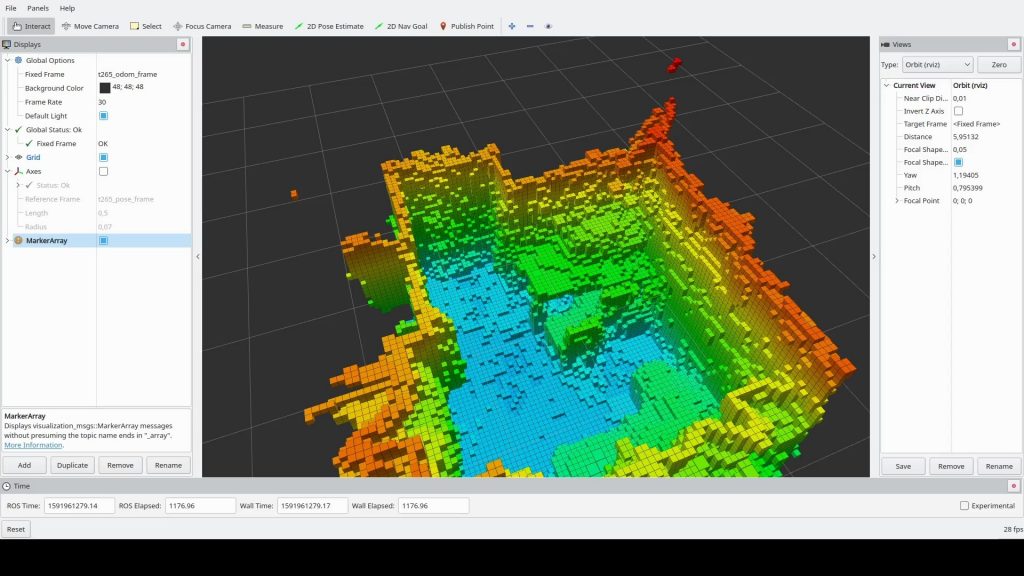
Octomap, aufgenommen mit einer Tiefenkamera, dargestellt in RVIZ.
Im Projekt Indoor-Copter ist der Software-Anteil besonders groß. Die Software wird größtenteils in ROS entwickelt. Ein Bestandteil der Software ist die Kartierung und Positionierung basierend auf Kameradaten. Für die Zukunft wollen wir den Indoor-Copter außerdem dazu bringen, eigenständig seine Bahn zu planen und Hindernissen auszuweichen.
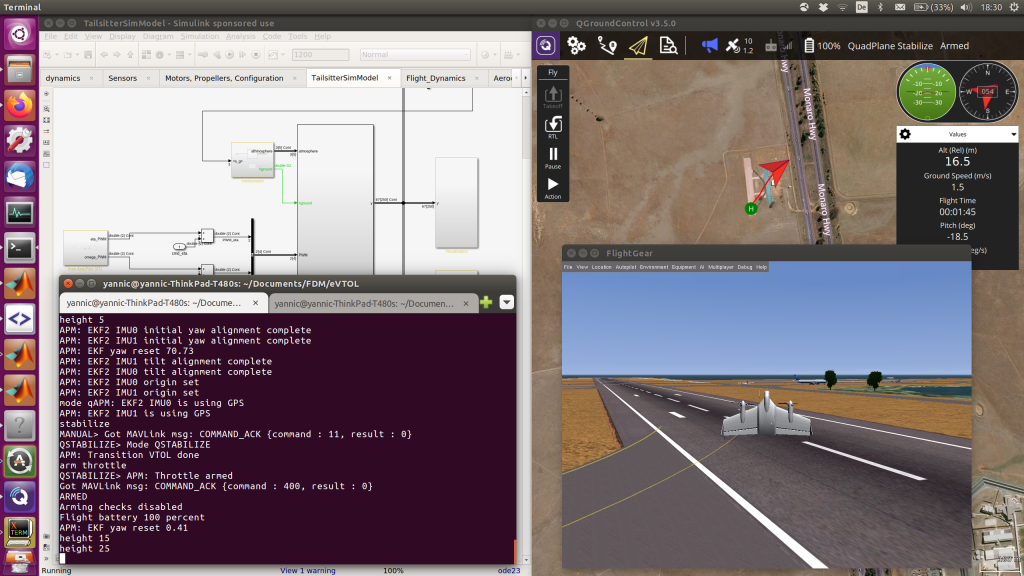
Im Projekt Tailsitter wird die Flugsteuerung derzeit in einer Software-in-the-Loop Simulation getestet und verbessert. Außerdem werden eigene Regelungen entwickelt, welche zu einem besseren Flugverhalten führen sollen.
Die Simulation spiegelt die Realität jedoch nicht exakt wieder, sodass wir regelmäßig Flugtests machen müssen. Hierzu treffen wir uns unter Einhaltung der Abstands- und Hygieneregeln in kleiner Runde im Freien.
Software-in-the-Loop Simulation mit einem Tailsitter.