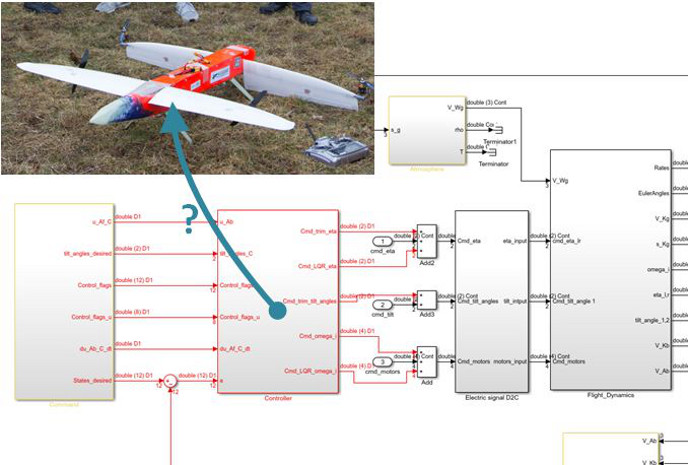
Im Februar 2017 hat der Senkrechtstarter Changyucopter seinen ersten Testflug erfolgreich absolviert. Yannic Beyer, der dieses Projekt initiiert hat, hat in seiner Masterarbeit u.a. ein Simulink Modell für die Steuerung dieses Senkrechtstarters entworfen. Wäre es nicht schön, wenn man das Simulink Modell nun auch an dem realen Modell testen könnte? Wenn man die Steuerung aus der Simulation auf einen Flight Controller, wie den Pixhawk, übertragen könnte? Um das zu lernen, haben wir kürzlich einen MathWorks Workshop am IFF organisiert. Dort wurde gezeigt, wie man einen C++ Code aus einem Simulink Modell generiert und auf einen Mikrocontroller lädt. Der Workshop war sehr interessant und hat neue Ideen in uns geweckt. Vielen Dank an MathWorks!